Benutzer-Werkzeuge
Inhaltsverzeichnis
Autopilot KAP (in Bearbeitung)
 Das Autopilot-Panel ist ähnlich aufgebaut wie die Avionics-Panel mit LC-Display und wurde in Anlehnung an das KAP-140 gestaltet. Das Panel wird über Ethernet mit dem FS-PC verbunden. Der Arduino-Sketch verarbeitet die Taster-/Drehgeber-Ereignisse, die über UDP (Ethernet) zu einer Schnittstellensoftware auf dem PC übertragen werden, der hieraus FS-Kommandos generiert. Die aktualisierten Variablen werden an das Arduino-Panel übertragen und auf dem LC-/OLED-Display dargestellt. Als Kommunikationssoftware kommen SimConnect-Clients für MSFS (FSX, FS2020) und P3D sowie X-Plane-Plugins für X-Plane zum Einsatz.
Das Autopilot-Panel ist ähnlich aufgebaut wie die Avionics-Panel mit LC-Display und wurde in Anlehnung an das KAP-140 gestaltet. Das Panel wird über Ethernet mit dem FS-PC verbunden. Der Arduino-Sketch verarbeitet die Taster-/Drehgeber-Ereignisse, die über UDP (Ethernet) zu einer Schnittstellensoftware auf dem PC übertragen werden, der hieraus FS-Kommandos generiert. Die aktualisierten Variablen werden an das Arduino-Panel übertragen und auf dem LC-/OLED-Display dargestellt. Als Kommunikationssoftware kommen SimConnect-Clients für MSFS (FSX, FS2020) und P3D sowie X-Plane-Plugins für X-Plane zum Einsatz.
Das System ist aufgebaut, wie bei den Avionics-Panel: Systemaufbau
Achtung! Dieses Panel ist nur bedingt MSFS2020-kompatibel, da viele Flugzeug-Entwickler nicht die Standard-Variablen des SimConnect-Servers benutzen. X-Plane ist in Vorbereitung.
Hardware
Das System besteht aus folgenden Komponenten:
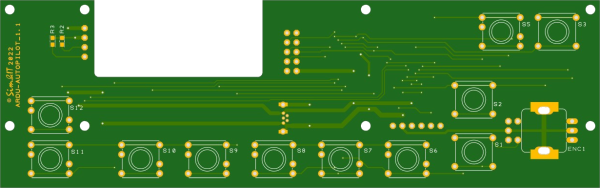
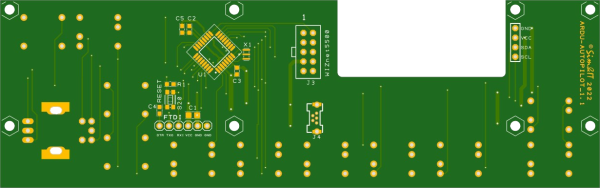
- Platine Ardu-Autopilot (160 x 50 mm²) mit
- den Tastern
- dem Dual-Drehimpulsgeber
- OLED-Anzeige 16×2 Zeichen und separater I²C-Ansteuerplatine
- Ethernet-Modul WizNET W5500
- Frontplatte (160 x 52 mm²)
Die Spannungsversorgung (+5 V) erfolgt über den Programmieranschluss oder über die Mini-USB-Buchse.
Leiterplatte
Software
Die Software besteht aus dem Arduino-Sketch und der Kommunikationssoftware. Das Prinzip ist bei den Avionics-Panel näher beschrieben.
Arduino Sketch
Das KAP-Panel mit dem Arduino-Sketch stellt ein Frontend zum SimConnect-Client bzw. X-Plane-Plugin dar.
Das Panel verbindet sich mit der Kommunikations-Software auf dem PC, Ereignisse werden an diese übertragen und die gelieferten Variablen-Werte werden angezeigt.
Das Ethernet-Modul wird mit dem Netzwerk verbunden und muss über DHCP eine Netzwerk-Adresse zugewiesen bekommen. Für die Datenverbindungund wird das UDP-Protokoll genutzt. Hier ist zu beachten, dass immer eine eindeutige MAC-Adresse und ein eindeutiger Port zugewiesen wird. Beide sind im Sketch definiert.
Die gestartete Software zeigt kurz die zugewiesene Netzwerk-Adresse an und wartet dann auf den Verbindungsaufbau durch die Kommunikations-Software. Durch den Verbindungsaufbau weiß die Arduino-Software, wohin sie die Daten senden soll.
- Anzeige der zugewiesenen IP-Adresse für ca. 3s
- Anschließend Warten auf Verbindungsaufbau durch ein Kommunikationsprogramm eines Flugsimulators (FSX/P3D-SimConnect-Client, X-Plane-Plugin)
- Anzeige des Connect-Status
Nach dem Verbindungsaufbau können Tasten- und Encoder-Ereignisse gesendet und Daten angezeigt werden, die von der Kommunikationssoftware in definierter Format übertragen werden.
Kommunikations-Software
Die Kommunikations-Software stellt die Verbindung zwischen dem Flugsimulator und dem KAP-Panel her. Wenn ein PC mehr als eine Netzwerkkarte besitzt, dann muss über die Konfigurationsdatei des Clients/Plugins dieser definiert werden. Beim Start werden dann die gefundenen Netzwerkadapter mit ihrer ID aufgelistet.
Über den Netzwerkadapter wird mit einer Anfrage auf der Broadcast-Adresse des Netzwerksegmentes und dem der jeweiligen Panel-Funktion zugeordneten UDP-Port (dieser muss mit dem Sketch übereinstimmen) der Controller gesucht. Der Controller empfängt diese Anfrage und kennt dadurch die IP-Adresse der sendenden Kommunikations-Software. An diese IP-Adresse wird dann die Bestätigung gesendet, wodurch der Kommunikations-Software die Controller-IP-Adresse übermittelt wird. Damit ist die Verbindung aufgebaut. Der Controller kennt jetzt die IP-Adresse des Flugsimulators und der Flugsimulator die IP-Adresse des Controllers.
Jetzt können Ereignisse des KAP-Panels über UDP zum Client/Plugin gesendet werden, der diese dann in Flugsimulator-Ereignisse umsetzt bzw. Anzeige-Varianten einstellt. Die aktualisierten Variablen werden in Anzeige-Zeichenketten umgewandelt und in definierter Form zurück an das KAP-Panel gesendet und dort auf dem Display angezeigt.
Zyklisch wird abgefragt, ob das Panel noch im System ist. Wenn innerhalb einer bestimmten Zeit auf diese Anfrage keine Antwort empfangen wird, dann geht der Client/das Plugin wieder in die Verbindungsaufbau-Phase und sendet Such-Anfragen auf der Broadcast-Adresse.
SimConnect-Client
Der SimConnect-Client (FSX, P3D, FS2020) ist ein eigenständiges Programm und kann direkt aus einem Ordner, z.B. dem Installationsordner, aufgerufen werden. Die Konfigurationsdatei kann in diesem Ordner angelegt sein oder in einem Unterordner des AppData-Bereiches.
.\AppData\Roaming\Sim&IT\SimConnect\Avionics-Panel.cfg
→ Weitere Informationen zu den SimConnect-Clients und deren Konfiguration sind hier zu finden.
X-Plane-Plugin
Das X-Plane-Plugin entspricht einer DLL. Diese sind im Unterordner .\ressources\plugins abgelegt. Das gefundene Plugin kann im gestarteten Flugsimulator über das Menü angezeigt werden. Im Info-Bereich wird entweder die Verbindung zum Avionics-Panel oder die Auswahl der Netzwerk-Adapter angezeigt, wenn mehr als ein Adapter gefunden wurde. Dieser muss in der Konfigurationsdatei definiert werden.
.\AppData\Roaming\Sim&IT\X-Plane-Plugins\Avionics-Panel.cfg
→ Weitere Informationen zu den X-Plane-Plugins und deren Konfiguration sind hier zu finden.
Funktionen
Das KAP-Panel realisiert folgende Tasten-Funktionen:
- AP - Schaltet dan Autopilot ein und aus.
- beim Einschalten wird Wing-Leveler (ROL) und VS-Mode wird aktiviert
- HDG - Umschaltung HDG-Kurs (HDG) halten oder Wing-Leveler (ROL)
- NAV - Navigationsmodus (NAV), erfasst und verfolgt VOR-Kurs
- APR - Landeanflug-Modus (APR), erfasst und verfolgt VOR-Kurs und Gleitpfad
- BC - Back Course
- ALT - Umschalten zwischen ALT- und VS-Mode.
- im ALT-Mode wird die aktuelle Höhe gehalten, diese wird angezeigt.
- im VS-Mode wird die aktuelle Steig-/Sinkrate angezeigt
- UP / DN - Ändern der Steig-/Sinkrate (VS wird im ALT-Mode kurzzeitig angezeigt)
- ARM - die über den Drehimpulsgeber einstellbare Höhe wird als Zielhöhe aktiviert
- BARO - Anzeige des QNH und Einstellung über den Drehimpulsgeber
- langer Druck schaltet zwischen inHg und mbar um
- FD - Flight Director ein-/ausschalten
Es werden folgende Anzeigen aud dem Display dargestellt:
- AP - Autopilot aktiv
- ROL - Wing-Leveler aktiv
- HDG - Heading halten
- NAV - NAV halten
- APR - Approach aktiv
- NAV-A - Navigationsmodus angefordert (ARM-ed)
- APR-A - Ladeanflug-Modus angefordert (ARM-ed)
- GS-A - Gleitpfad angefordert (ARM-ed)
- VS - Steig-/Sinkrate halten
- ALT - Höhe halten aktiv
- GS - Gleitpfad aktiv
- ALT-A - Höhe halten angefordert (ARM-ed)
- Digital-Anzeige für VS, ALT, BARO
Links
Systemaufbau wie Avionics-Panel
Seiten-Werkzeuge
